Is Depth Really Necessary for Salient Object Detection?
Jiawei Zhao, Yifan Zhao, Jia Li*, Xiaowu Chen
State Key Laboratory of Virtual Reality Technology and Systems, Beihang University
Approach
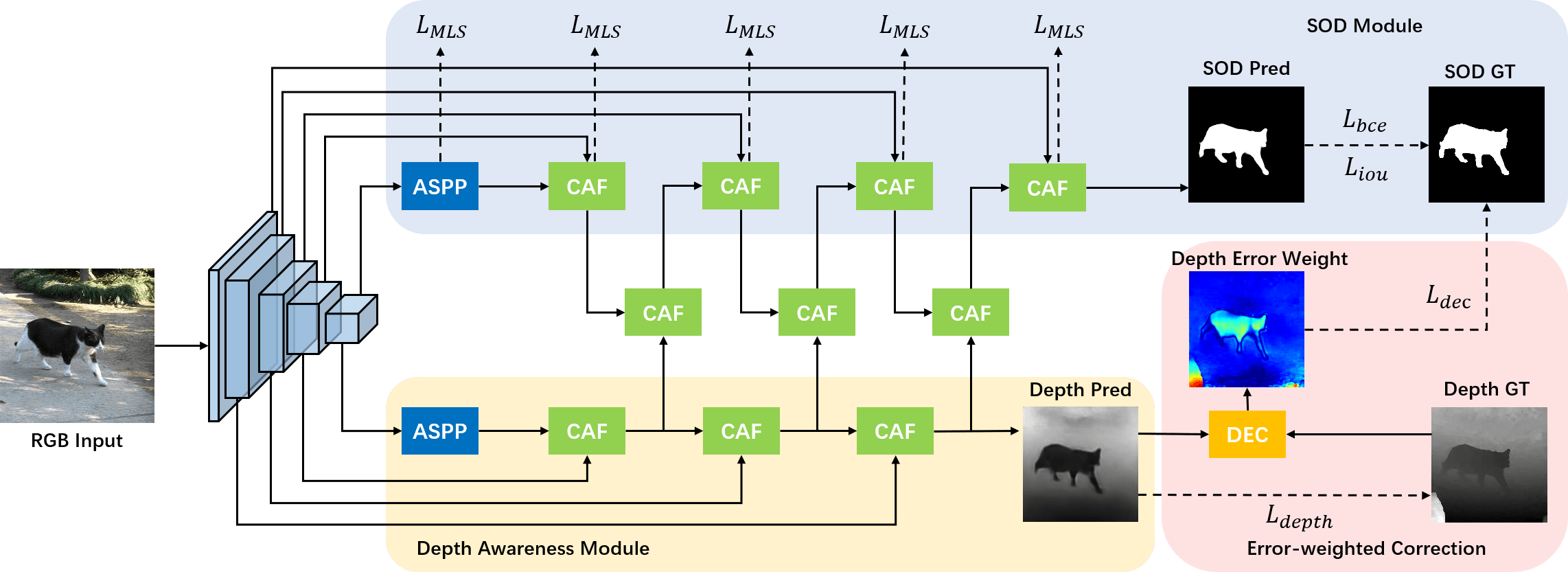
The overall architecture of our model. Our depth-awareness SOD framework (DASNet) is mainly composed of three parts,~\ie, a salient object detection module, a depth awareness module and an error-weighted correction. ASPP denotes atrous spatial pyramid pooling. CAF denotes the proposed channel-aware fusion module. DEC denotes the proposed depth error-weighted correction. The dashed line denotes supervision.
Relations and Discussions
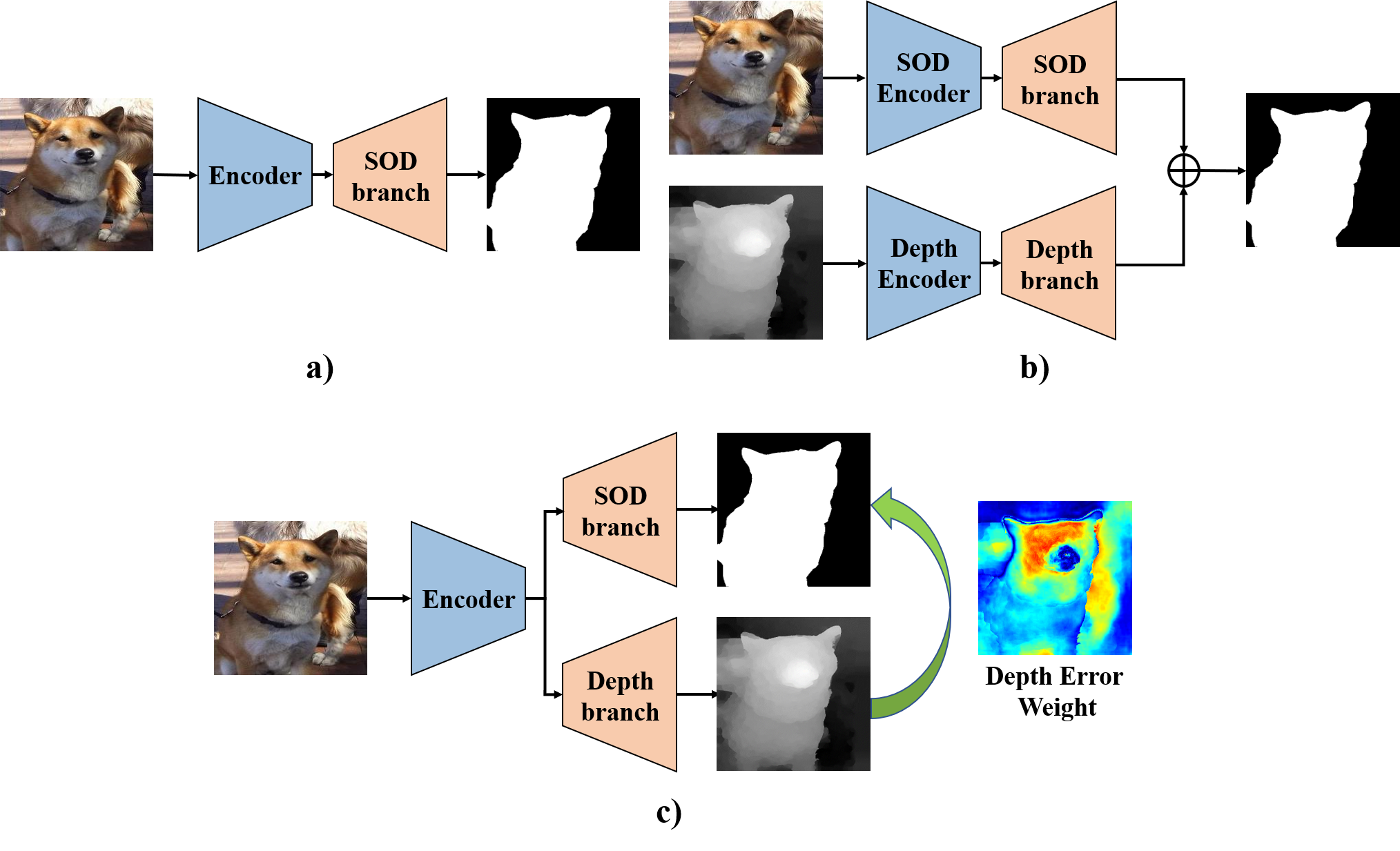
Different types of SOD architecture. a) : Typical RGB-based SOD network architecture. b): Typical RGBD-based SOD network architecture. c): Proposed Depth-awareness SOD network architecture.
RGB-D SOD Benchmark
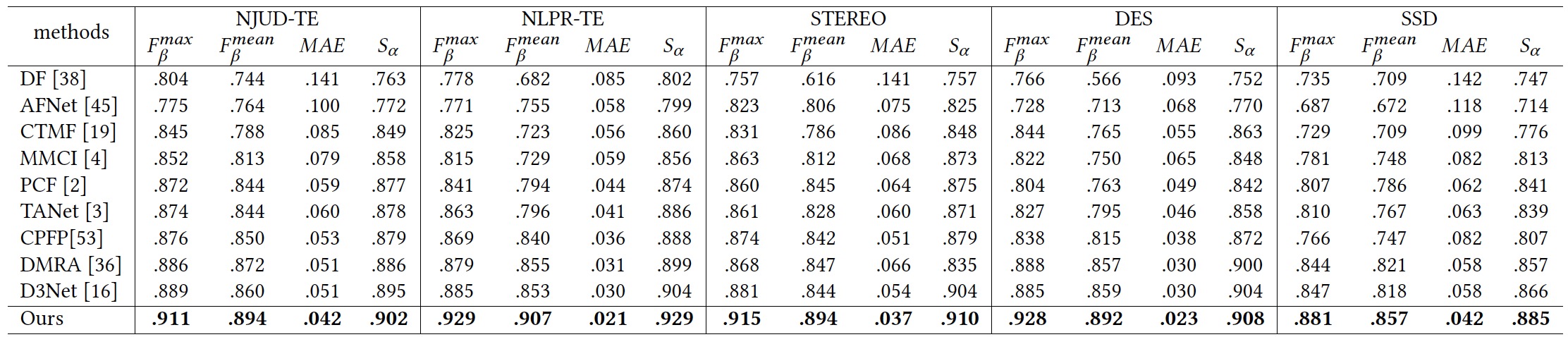
Performance comparison with 9 state-of-the-art RGBD-based SOD methods on five benchmarks. The best results are highlighted in bold.

Qualitative comparison of the state-of-the-art RGBD-based methods and our approach. Obviously, saliency maps produced by our model are clearer and more accurate than others in various challenging scenarios.
RGB SOD Benchmark
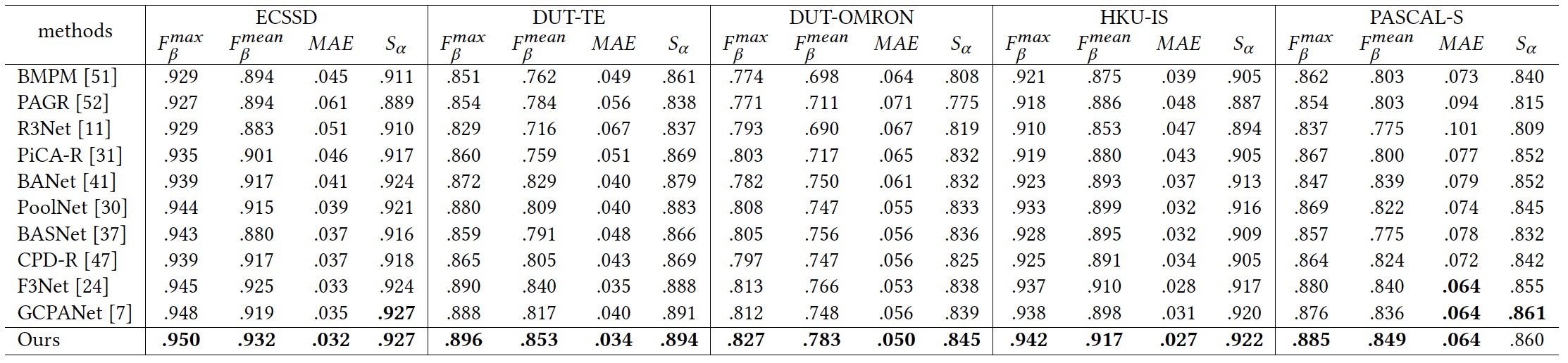
Performance comparison with 10 state-of-the-art RGB-based SOD methods on five benchmarks. The best results are highlighted in bold.
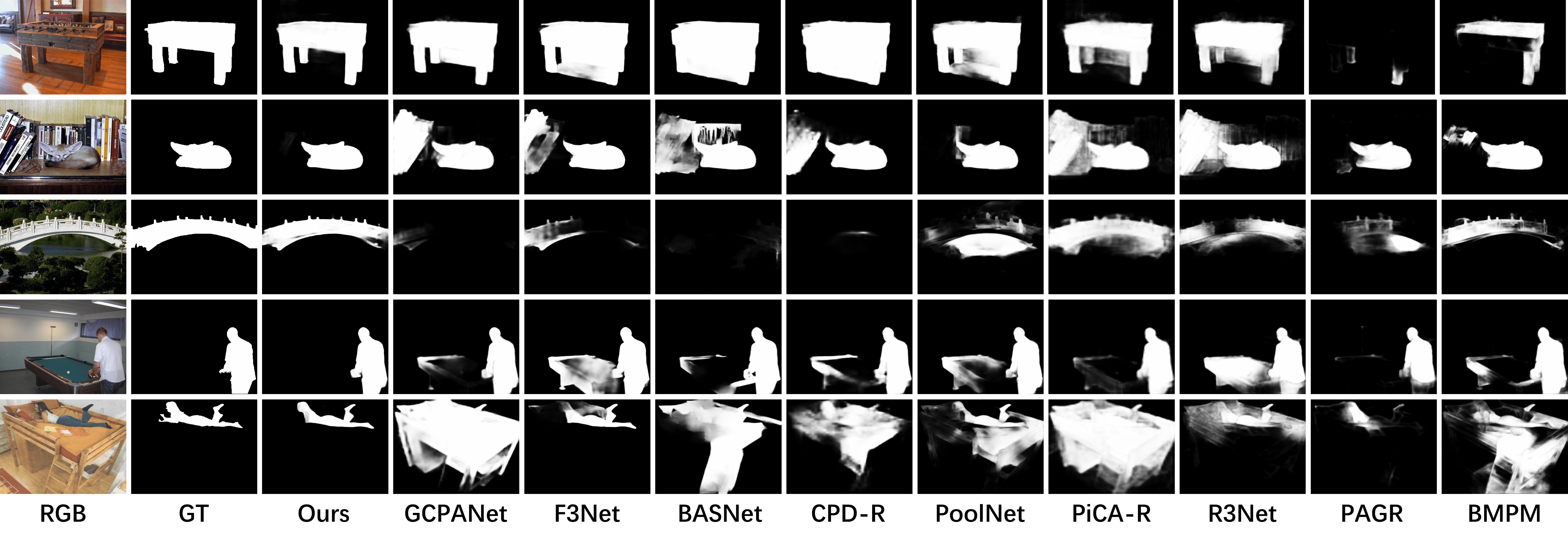
Qualitative comparison of the state-of-the-art RGB-based methods and our approach. Obviously, saliency maps produced by our model are clearer and more accurate than others in various challenging scenarios.
Computational Efficiency
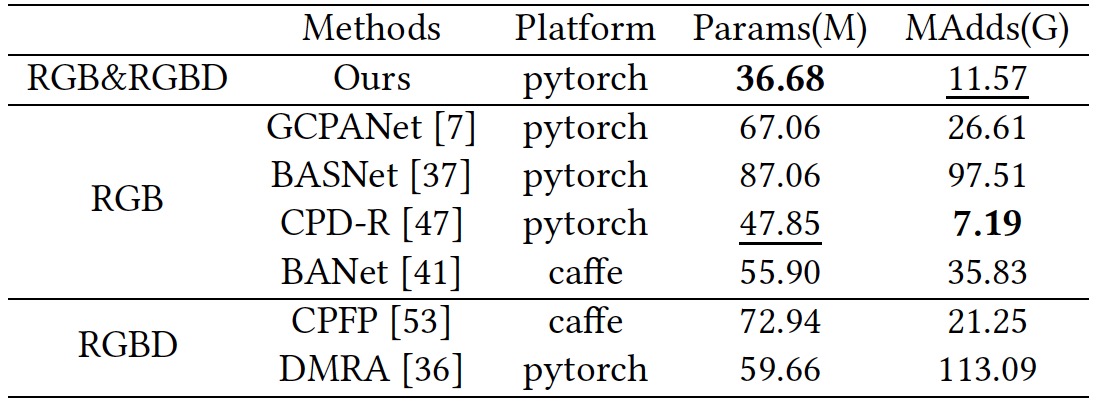
Complexity comparison with RGB-based models and RGBD-based models. Models ranking the first and second place are viewed in bold and underlined.
Update logs
2020/08: We have updated the results.
Citation
-
Jiawei Zhao, Yifan Zhao, Jia Li*, Xiaowu Chen. Is Depth Really Necessary for Salient Object Detection?
- Paper: [PDF, 5.7MB]