What is and What is not a Salient Object? Learning Salient Object Detector by Ensembling Linear Exemplar Regressors
Changqun Xia Jia Li Xiaowu Chen Anlin Zheng Yu Zhang
State Key Laboratory of Virtual Reality Technology and Systems, Beihang University
Published in CVPR, 2017
The Approach
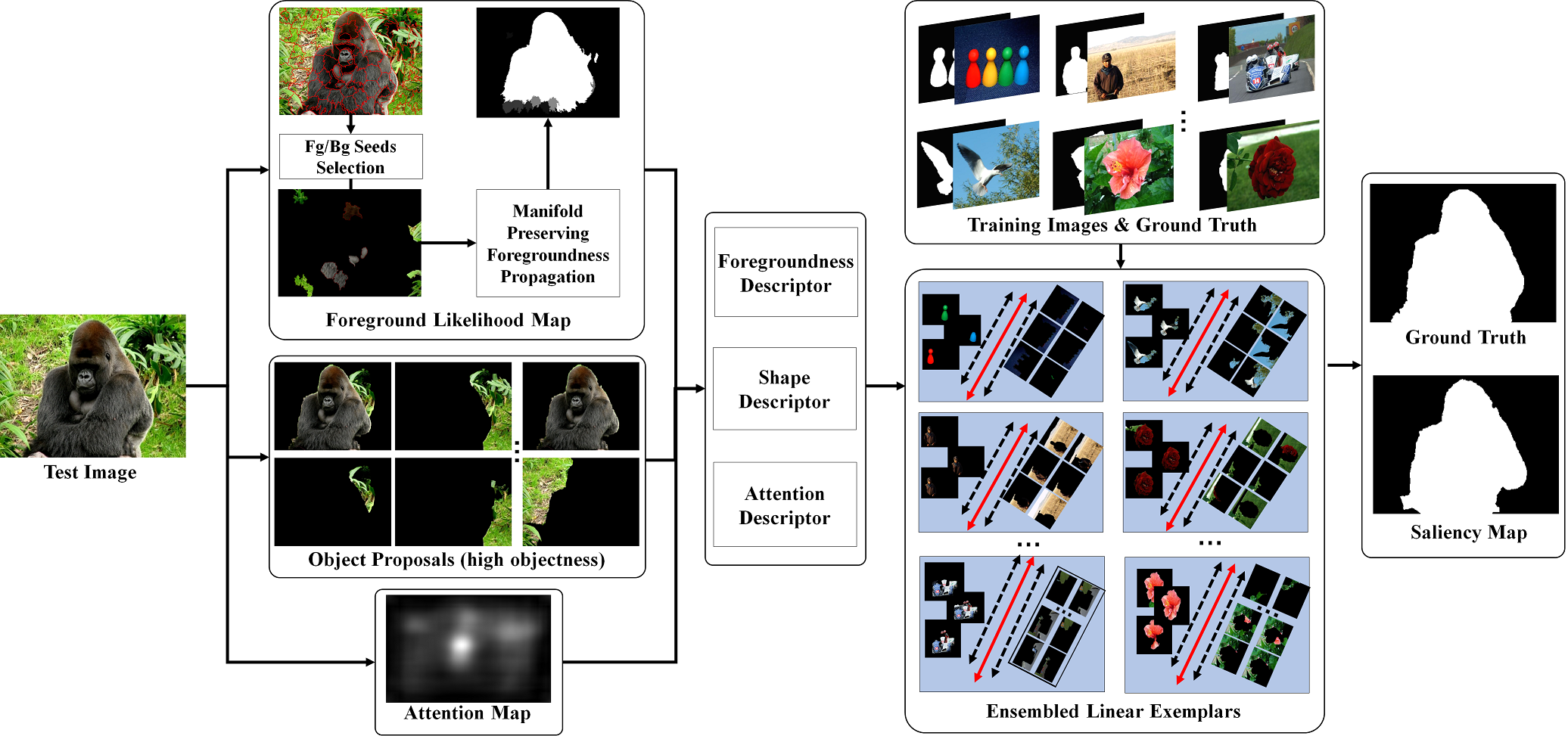
Inspired by these two findings on what are salient and non-salient objects, we propose a simple yet effective approach for image-based SOD by ensembling plenty of linear exemplar regressors.
Manifold-preserving Foregroundness Propagation

Foregroundness map estimation via manifold preserving foregroundness propagation. (a) Input image, (b) Initialized foregroundness map for foreground/background seed selection that enforce similar foregroundness scores at spatially adjacent superpixels, (c) final foregroundness map that adopts the locally linear embedding (LLE) scheme to guide the propagation process.
Result
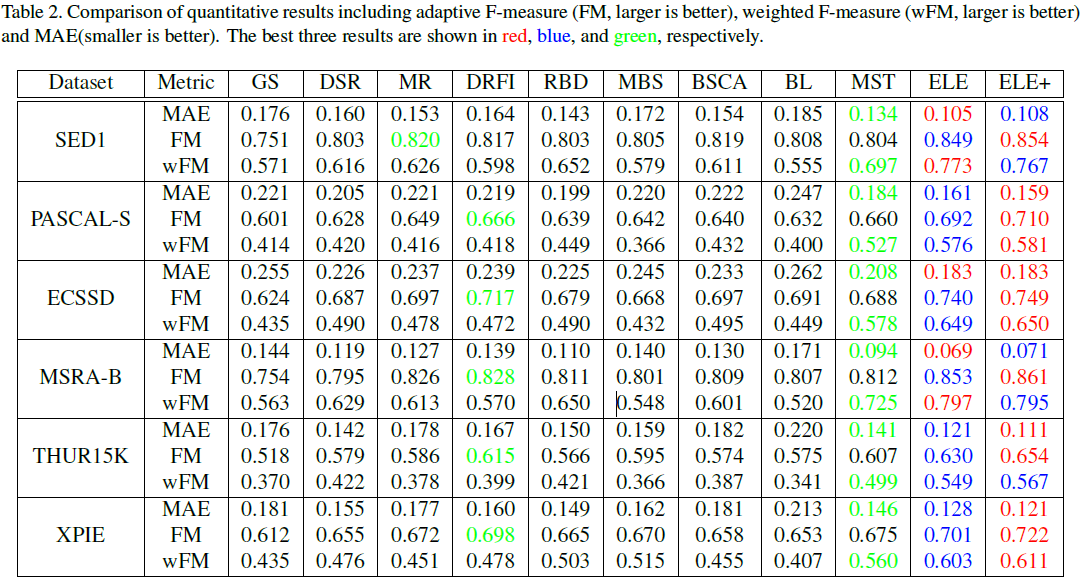
The performance scores of our approaches and the other 9 methods.

Representative results of our approach (ELE and ELE+) and 9 state-of-the-art methods.
Citation
-
Changqun Xia, Jia Li, Xiaowu Chen, Anlin Zheng and Yu Zhang. What is and what is not a salient object? learning salient object detector by ensembling linear exemplar regressors. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017: 4321-4329.
- Paper: [CVF Open Access] [BibTeX]